
Dr Ketao Zhang
BSc, PhD, FHEA
News
July 2026 | ||
 Queen Mary Materials technology on display at the NEC8 July 2026Technology from Queen Mary's School of Engineering and Materials Science (SEMS) was exhibited at the Advanced Materials Show at the NEC in Birmingham. The trade fair, which takes place alongside the Advanced Ceramics Show, the Vehicle Electrification Expo and the Battery Cells & Systems Expo, featured over 300 exhibitors along … [more] | ||
May 2025 | ||
 Queen Mary Robotics team wins second place at global RoboSoft 2025 competition6 May 2025A team from Queen Mary’s Robotic Systems Research Group earned an impressive second place at the prestigious IEEE RoboSoft 2025 Manipulation Competition, held 23–26 April in Lausanne, Switzerland. Led by Senior Lecturer Dr Ketao Zhang, Director of the Robotics Systems Research (RSR) Group at the Centre for Advanced Robotics … [more] | ||
March 2025 | ||
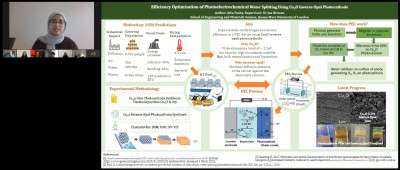
 Early career researchers present to parliamentary officials at STEM for BRITAIN 202521 March 2025On Tuesday 11th March, two PhD students and a post-doctoral researcher from Queen Mary's School of Engineering and Materials Science presented their pioneering research at the Houses of Parliament, as part of the annual STEM for BRITAIN event. The prestigious competition and exhibition, established in 1997, is organised by the … [more] | ||
October 2024 | ||
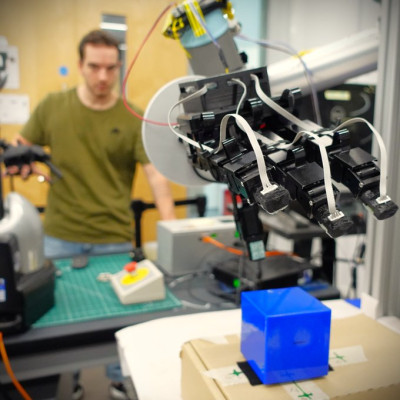
 Queen Mary researchers pioneer advanced AI and robotics to transform vineyard harvests29 October 2024In a bid to revolutionise grape harvesting, Queen Mary researchers are piloting new robotic grape pickers in collaboration with Extend Robotics and the Saffron Grange vineyard. The project focuses on developing a robotic system equipped with advanced sensors and AI, to detect ripeness and gently pick grapes with pressure-sensitive "… [more] | ||
 Queen Mary Students Win ASME Travel Award for Innovative Robot11 October 2024A team of final-year MEng students from Queen Mary University of London has been awarded the travel prize at the 2024 American Society of Mechanical Engineers (ASME) Student Mechanism and Robot Design Competition in Washington DC. The team was made up of six Robotics Engineering and Mechanical Engineering students from the … [more] | ||
August 2024 | ||
 Congratulations to Dr Chen Liu for passing his PhD viva7 August 2024Chen's PhD thesis, titled 'Wearable Orthoses with Semi-Active and Active Absorbers for Hand Tremor Suppression', demonstrates groundbreaking work addressing the limitations of existing hand tremor treatments, by developing novel flexible wearable orthoses integrating both semi-active and active schemes. Key innovations in his research include: A semi-active absorber using self-sensing … [more] | ||
July 2024 | ||
 Queen Mary PhD Student Wins Best Poster Award at the Hamlyn Symposium on Medical Robotics16 July 2024Queen Mary PhD student Haipeng Liang has been awarded the Best Poster Award at the 16th Hamlyn Symposium on Medical Robotics, held on 25th-28th June. The award-winning poster, titled "A Pneumatic-Driven Robot for MR-Guided Prostate Therapy," showcases innovative research and significant advancements in the field of medical … [more] | ||
March 2024 | ||
 Postgraduate students present research at ILF March 202418 March 2024Our MEng and MSc students presented their Research Projects at the Industrial Liaison Forum on 6th March 2024. Our MEng students conduct team projects in their fourth year in groups of four to six students. Currently towards the end of their projects, they were able to present a mix of prototypes, … [more] | ||
 MSc Extended Research Project poster prize winners at ILF March 202417 March 2024Our MSc students presented their Extended Research Projects at the Industrial Liaison Forum on 6th March 2024. Our MSc projects run from semester 1 through to August, so they are currently only about half-way through their projects. Nonetheless, they were able to give an excellent account of their work so far and … [more] | ||
 Robotics student wins the Best Poster Presentation at the SoRo 20248 March 2024Chen Liu, a final-year PhD student of the Robotic Systems Research group led by Dr Ketao Zhang, was awarded the Best Poster of the Medical Robot Conference, Conference of Mapping the Future of Soft Robotics for Healthcare (SoRo), in London on 26th and 27th February. Chen presented his recent work … [more] | ||
September 2023 | ||
 Success of Queen Mary researchers and students at TAROS 2023 - the UK Robotics Conference22 September 2023On September 13-15, 2023 the Centre for Advanced Robotics @ Queen Mary University of London (ARQ) traveled to Cambridge, UK to present their research at TAROS 2023 - the UK oldest robotics and autonomous systems conference. ARQ was represented by multiple research papers and posters at TAROS 2023. Gabriele Gudici's work was selected … [more] | ||
July 2023 | ||
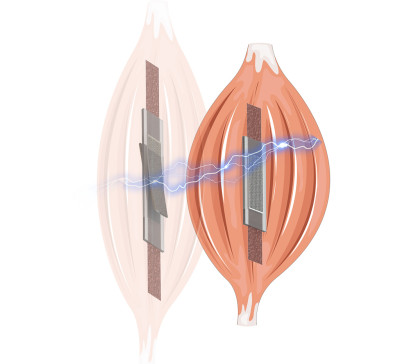 Revolutionary Self-Sensing Electric Artificial Muscles11 July 2023In a study published recently in Advanced Intelligent Systems researchers from Queen Mary University of London have made significant advancements in the field of bionics with the development of a new type of electric variable-stiffness artificial muscle that possesses self-sensing capabilities. This innovative technology has the potential to revolutionize soft … [more] | ||
June 2023 | ||
 Professor Kaspar Althoefer co-chairs the prestigious IEEE International Conference on Robotics and Automation 202316 June 2023The largest and most prestigious conference on robotics, IEEE International Conference on Robotics and Automation 2023 (ICRA) was held in the ExCeL centre, London, May 29 - June 2, 2023. The conference was co-organised by the Centre of Advanced Robotics at Queen Mary (ARQ) and was co-chaired by Professor Kaspar Althoefer, SEMS academic and … [more] | ||
September 2022 | ||
 Teams of bee-like drones are ready to 3D-print buildings22 September 2022"The homes and cities of the future could be built with the help of autonomous robots," says Queen Mary's Dr Ketao Zhang. Researchers have created a team of drones that can print 3D constructions while they are flying. These flying robots can coordinate and make … [more] | ||
October 2021 | ||
 New research published on Soft Matter by Chen Liu and Dr Ketao Zhang of Robotic Systems Group, in collaboration with Xi’an Jiaotong University (China), demonstrates a new type of variable stiffness artificial muscle.14 October 2021The soft robot requires variable stiffness technology, which shall be simplified and compliant with the robotic motion. As inspired by the principle of biological muscle, this paper designed a light and fully flexible artificial muscle which can be manufactured by 3D printing technology. With a voltage on, the artificial muscle … [more] | ||
April 2021 | ||
 Industrial Liaison Forum #4 Prize Winners Announced21 April 2021The fourth Industrial Liaison Forum (ILF#4) took place online on 21 April 2021. ILF#4 was the 3rd year undergraduate Project Showcase. We had invited 35 students to present their project posters. The event attended by more than 170 visitors at the peak including several of our Industrial Advisory Board Members, potential new students and … [more] | ||
September 2020 | ||
 Dr Ketao Zhang Honoured with Best Reconfigurable Parallel Mechanism Paper Award of Parallel202011 September 2020Dr Ketao Zhang's work on parallel robot mechanisms - that can change their structure and functionalities like "Transformers" - has been honoured with the Best Reconfigurable Parallel Mechanism Paper of The 4th International Conference on Fundamental Issues, Applications and Future Research Directions for Parallel Mechanisms / Manipulators / Machines. The conference was … [more] | ||
February 2020 | ||
 Robot Hand Team Wins Top Prize at ILF26 February 2020A team of 4th year MEng students Jamie SENGUN, Ahmed DEIRI, Talha TAILOR, Kai PAGE & Mohammed KHAN who have been working on the "Soft 3D-printed Robotic Hand" project supervised by Dr Lorenzo Jamone & Dr Ketao Zhang won the best MEng group project prize at the Annual … [more] | ||
September 2019 | ||
Welcome to the Robotic Systems Group23 September 2019From this week we have two PhD students joined the Mechanisms and Field Robotics research group of the Centre for Advanced Robotics @ Queen Mary University of London. Welcome, Navin and Zhujin! | ||
December 2018 | ||
New PhD scholarship is now open, Deadline 31 Jan 201914 December 2018QMUL fully funded PhD scholarship (UK/EU)(X1): Please find the details using the link below: https://www.sems.qmul.ac.uk/research/studentships/316/reconfigurable-mobile-robotic-manipulator-rm2 | ||