
Dr Ketao Zhang
BSc, PhD, FHEA
Research Overview
Robotics, Aerial Robotics, Kinematics and Dynamics, Bio-inspired Design, Design of mechanisms and robotic systems, Soft Robotics, Parallel Manipulators, Additive Manufacturing
Dr Ketao Zhang's research focuses on Embodied and Intelligent Robotics, integrating robotic morphology, sensing, control, and learning to achieve robust interaction with complex environments. His work advances reconfigurable mechanisms, soft and adaptive structures, bio-inspired design, and multi-agent robotic systems, with strong foundations in mechanical intelligence and physical AI.
The main research themes:
- Robotic Hands, Grippers, and Manipulators – morphology-driven dexterity and adaptive manipulation.
- Origami-Inspired Design and Reconfigurable Mechanisms – deployable and metamorphic robotic structures.
- Aerial Robotics and Multi-Agent Systems – decentralised coordination, aerial manipulation, and robotic construction.
- Soft Actuators and Integrated Sensors – variable-stiffness artificial muscles and embedded force sensing for physical intelligence.
Highlights of research outcomes and contributions
1. Bio-inspired Aerial Robotics and Application in 3D Construction

Natural builders demonstrate significant degrees of adaptability in building their habitats, and many do so with the aid of flight and additive material depositing methods. The natural systems inspired the research topic of collective construction employing a network of mobile robots operating as a multi-agent system. Inspired by the way social insects and birds build their habitats which embody highly sophisticated environmental engineering performance, we developed an Aerial Additive Manufacturing (Aerial-AM) system that is able to operate as an automated manufacturing process, capable of coordinating parallel building actions amongst a team of autonomous aerial robots.
Selected references:
Zhang, K., Chermprayong, P., Xiao, F. et al. Aerial additive manufacturing with multiple autonomous robots. Nature 609, 709–717 (2022).
2. Robotic Hand and Gripper
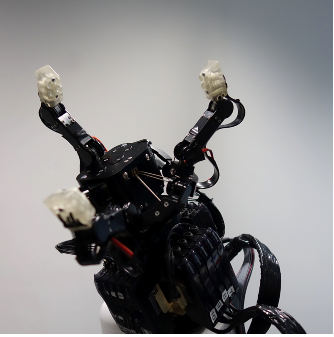
Multi-fingered robotic hands, from the pioneer designs with purely conventional kinematic pairs to the recent developments with compliant elements, are capable of completing a large number of automation tasks, including not only grasping but sophisticated manipulation in production, nuclear plants, domestic service robots and space engineering. Based on the principle of metamorphosis, a series of multi-fingered robot hands capable of reconfiguring their versatile palm and adapting to a variety of shapes of objects and various work environments were developed to support the learning of a variety of manipulation affordances with different hand pre-shapes. Inspired by living systems in nature, materials capable of large elastic deformation have been further introduced in the development of robotic hands/grippers to bring in self-adaptability by leveraging the inherent compliance of soft/flexible materials.
Selected references:
H. Godaba, A. Sajad, N. Patel, K. Althoefer and K. Zhang, A Two-Fingered Robot Gripper with Variable Stiffness Flexure Hinges Based on Shape Morphing, 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2020, pp. 8716-8721.
M. Calzati, K. Zhang, V. ,Parenti Castelli, and J.S. Dai, Kinematics Analysis and Control of a Three-Fingered Metamorphic Robot Hand. Proceedings of the ASME 2016 IDETC, 2016. V05BT07A053.
3. Origami-Inspired Robots
The recent crossdisciplinary study on origami and kinematic structure opens new trends of research on foldable mechanisms and evolved flexible robots, especially on the design methodology and manufacturing process for constructing three-dimensional active structures from two-dimensional flat-sheet models. In contrast to the conventional mechanisms, the origami-inspired systems have distinct flexibility and foldability which are expected in real-world applications. The emerging development of origami-inspired mechanical systems showed that knowledge of origami in artistic discipline is capable of being well applied in a wide range of areas in engineering such as architecture design and fabrication of smart robotic systems. The interdisciplinary study on both origami and kinematic structure presented an interesting approach to identifying new mechanical embodiment of intricate origami.
Our work in this area led to unique mathematical approaches for modelling kinematics and statics of various foldable structures in terms of screw theory by aggregating the folding characteristics of individual creases. In particular, the motion of panels and creases of origami-inspired structures were investigated by identifying the constraints of creases taken as compliant joints. This in-depth unravelling of principles and approaches for modelling origami structures resorting to mechanism theory in the engineering discipline provides fundamental bases for the development of novel concepts and manufacturing techniques of origami-inspired systems.
Selected references:
K. Zhang, C. Qiu, J. S. Dai, An Extensible Continuum Robot with Integrated Origami Parallel Modules, ASME Transactions, Journal of Mechanism and Robotics, 8(3), 031010, 2016.
M. Salerno, K. Zhang, A. Menciassi, J. S. Dai, A Novel SMA Actuated 4-DOF Origami Grasper for Minimally Invasive Surgery, IEEE Transactions on Robotics. 32(3), pp. 484-498, 2016.
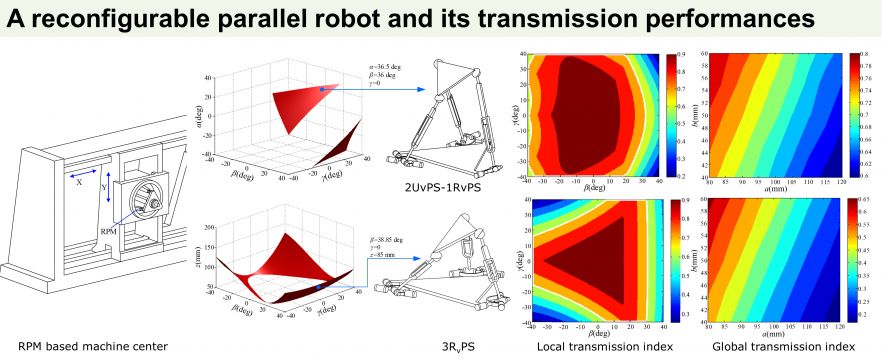
4. Reconfigurable/metamorphic parallel manipulators
Robot mechanisms research is a fundamental study with strong science elements. My early work on reconfigurable mechanisms is a piece of fundamental research aimed at investigating the characteristics of reconfigurability of a class of novel mechanisms that can adapt to various tasks and environments. The pioneering study revealed underlying principles of metamorphosis and proposed mathematical modelling for the topological reconfiguration based on graph theory, screw algebra and line geometry. This led to the invention of the variable-axis (vA) joint and the development of a class of reconfigurable mechanisms, including the 3-SvPS parallel mechanism that can be used as the structure of a reconfigurable robotic machine centre with adaptability to changing task requirements.
Selected references:
W. Ye, X. Chai and K. Zhang, Kinematic Modeling and Optimization of a New Reconfigurable Parallel Mechanism. Mechanism and Machine Theory, 2020.
K. Zhang, J. S. Dai, and Y. Fang, Geometric Constraint and Mobility Variation of Two 3SvPSv Metamorphic Parallel Mechanisms. ASME. J. Mech. Des. January 2013; 135(1): 011001.
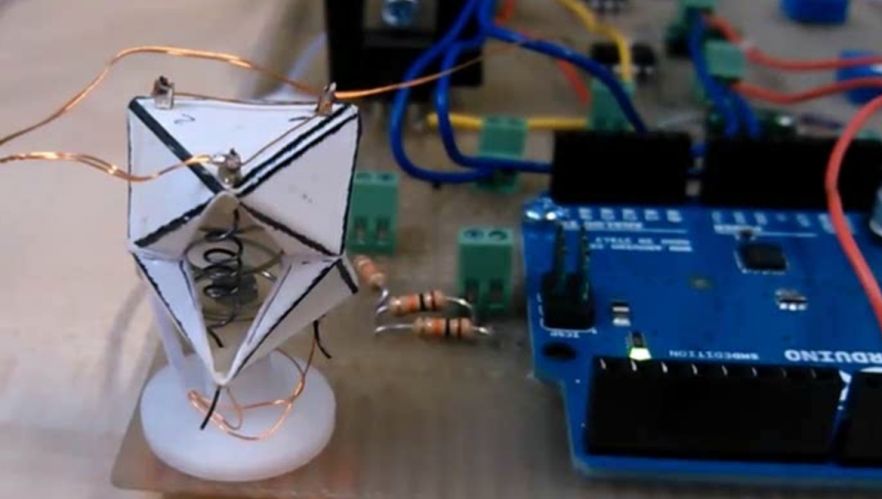
5. Artificial Muscles

Flexible electric artificial muscle capable of self-sensing and rapidly adjusting the stiffness along the stretching direction is developed referencing the biological smooth muscle contraction. The integrated self-sensing function enables fast response to stimuli and simplifies control of the actuation-sensing system, which opens up new possibilities for advancing soft robotics and wearable medical rehabilitation devices.
Selected references:
C Liu, JJC Busfield, K Zhang. An Electric Self‐Sensing and Variable‐Stiffness Artificial Muscle. Advanced Intelligent Systems, Wiley
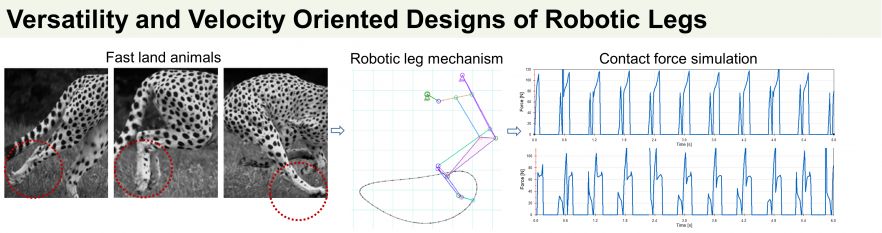
5. Mechanism Design of Legged Mobile Robots
Among the mobile robotic research field, legged locomotion is largely applied for advanced robotic systems due to the higher degree of versatility compared to wheeled robots, which allows them to successfully move and interact in unstructured environments. Legged robots present several designing challenges, particularly leg mechanism design is very complex from a mechanical point of view and requires a study of all factors responsible for locomotion dynamics. Drawing inspiration from fast running animals, we developed novel leg structures that can exploit the walking gait dynamics and achieve optimized balance between velocity, dexterity and energy efficiency.
Selected references:
S Asci, K Zhang, Design and Kinematic Simulation of a Novel Leg Mechanism for Multi-Legged Robots. ASME IDETC2021.