
Research
Spacecraft Large Attitude Estimation Using a Navigation Sensor
| Principal investigator: | Ranjan VEPA |
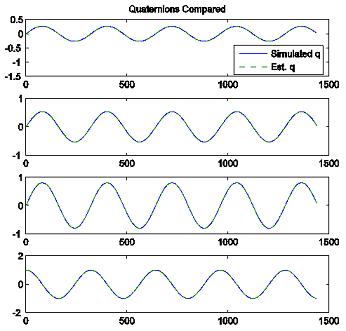 In this work we assume that we have measurements of a first difference of a typical satellite navigation carrier phase differential which is a homogeneous quadratic function of the components of the attitude quaternion. We illustrate the determination of large or sustained attitudes using a dedicated unscented Kalman filter. The unscented Kalman filter structure was chosen for the dedicated filter because of its derivative free nature and other advantages. When a Gaussian distributed vector random variable is transformed to an equivalent quaternion it does not continue to be Gaussian distributed. For this reason, a new predictor-corrector form of the unscented Kalman filter is proposed to maintain the normalization of the unscented mean quaternion estimate in the presence of additive disturbances. The results from our realistic simulations indicate that the large attitude of a spacecraft can be estimate to within 0.1% accuracy over large time frame. The filter is particularly useful for autonomous operations of spacecraft as well as in other applications where the process model is bilinear or second order in the states.
In this work we assume that we have measurements of a first difference of a typical satellite navigation carrier phase differential which is a homogeneous quadratic function of the components of the attitude quaternion. We illustrate the determination of large or sustained attitudes using a dedicated unscented Kalman filter. The unscented Kalman filter structure was chosen for the dedicated filter because of its derivative free nature and other advantages. When a Gaussian distributed vector random variable is transformed to an equivalent quaternion it does not continue to be Gaussian distributed. For this reason, a new predictor-corrector form of the unscented Kalman filter is proposed to maintain the normalization of the unscented mean quaternion estimate in the presence of additive disturbances. The results from our realistic simulations indicate that the large attitude of a spacecraft can be estimate to within 0.1% accuracy over large time frame. The filter is particularly useful for autonomous operations of spacecraft as well as in other applications where the process model is bilinear or second order in the states.
Related Publication: “Spacecraft Large Attitude Estimation Using a Navigation Sensor,” Royal Institute of Navigation’s The Journal of Navigation, vol. 63, no. 01, Jan., 2010, pp. 89-104.