Research
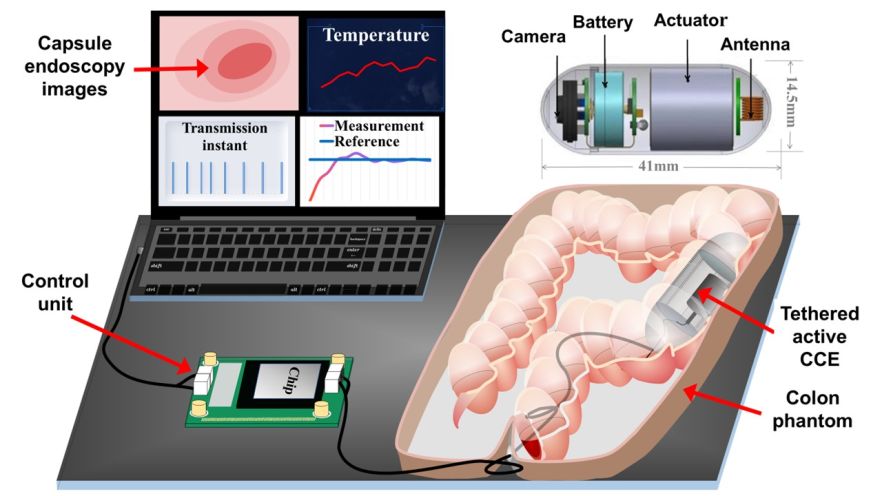
Capsule/miniature robot for health care (screening) inside human body
| Principal investigator: | Hasan SHAHEED |
Diseases in the Gastrointestinal (GI) tract, such as bleeding, ulcers, abdominal pain and cancer, are quite common in humans. An ideal solution for GI tract investigation/screening seems to be a wireless active miniature robotic device/capsule endoscope. The aim of this research is to design, model development and control an active capsule robot for GI tract screening. As an initial evaluation, the performance of the capsule robot will be tested on a soft surface/on phantom. This project also focuses on developing a control approach for navigating the active capsule robot within the challenging GI tract environment. The aim of the proposed control scheme is to ensure accurate navigation of the capsule device through the GI tract, reduce device oscillations resulting in patient comfort, lower energy consumption, and improve communication resource efficiency. The research is carried out in collaboration with the National Centre for Bowel Research & Surgical Innovations (NCBRSI), Blizard Institute, Barts and the London School of Medicine & Dentistry, Queen Mary University of London. We have already designed and fabricated an impact-based locomotion mechanism for the capsule device (patent filed, PCT/EP2021/075342).